Lab 2: IMU
ECE 4160 – Fast Robots
Objective
The purpose of this lab was to start setting up sensors with our artemis board, starting with the IMU. The second goal was to be able to record a stunt with our car.
Lab Tasks
Set up the IMU
To set up the IMU I used one of the qwicc cable to connect the IMU to the Artemis. I then downloaded the library add learned how to control the sensor with the example code.
LSB of the IMU’s I²C address based on the AD0/ADR pin state (choosing between 0x68 and 0x69). My IMU used address 0x69 so I set AD0_VAL to 1. Depending on how the sensor is oriented, the accelerometer will read different values. For the gyroscope it reads very small values unless the sensor is moving.
Visual indication the board is running
I first added a simple LED blink so in setup() so that I could tell that the board was running.
Accelerometer: pitch and roll from accel
Code to calculate pitch and roll:
float pitch = atan2((&myICM)->accX(), (&myICM)->accZ()) * (180.0 / M_PI);
float roll = atan2((&myICM)->accY(), (&myICM)->accZ()) * (180.0 / M_PI);
Outputs at {-90, 0, 90} degrees
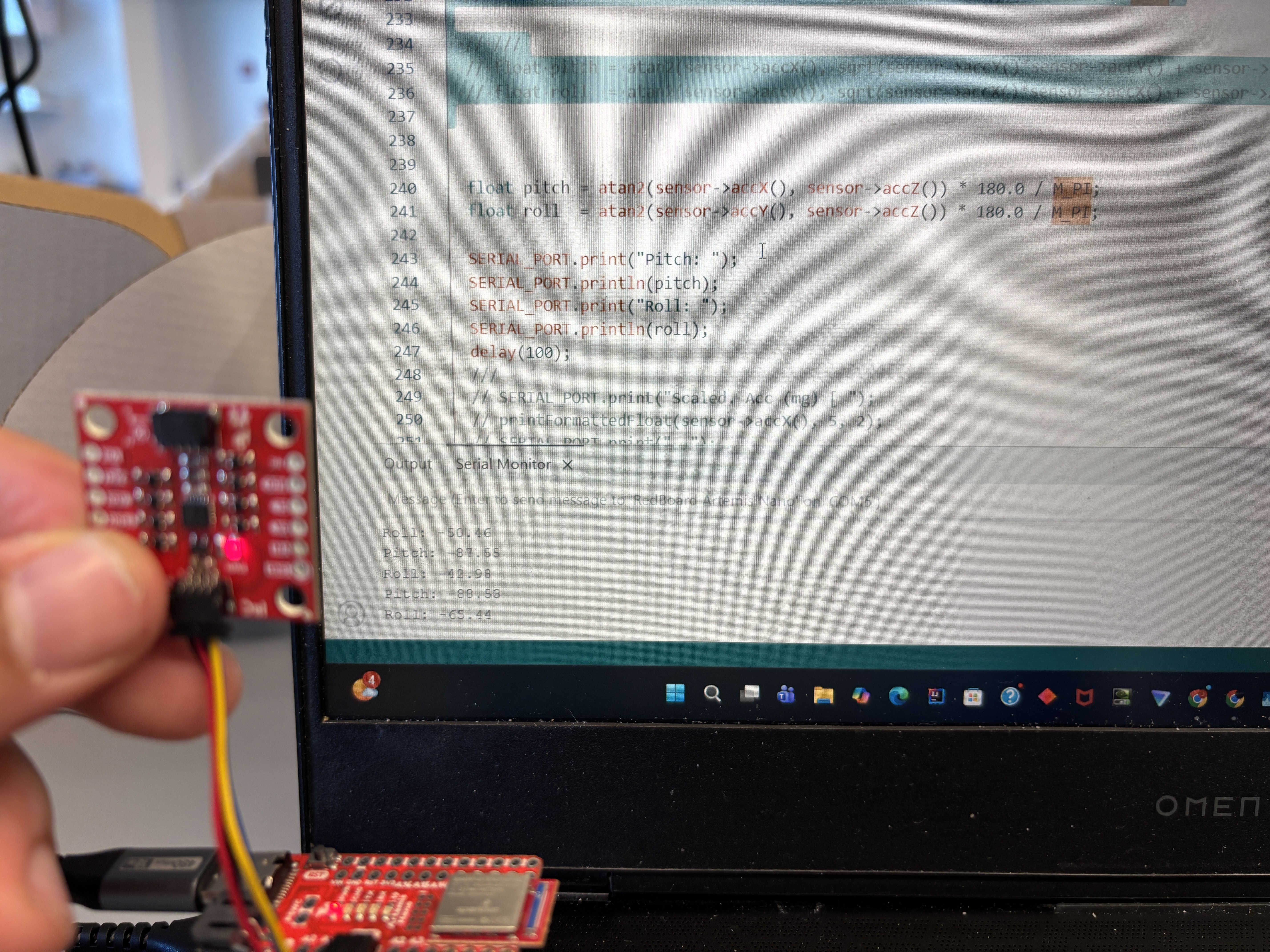
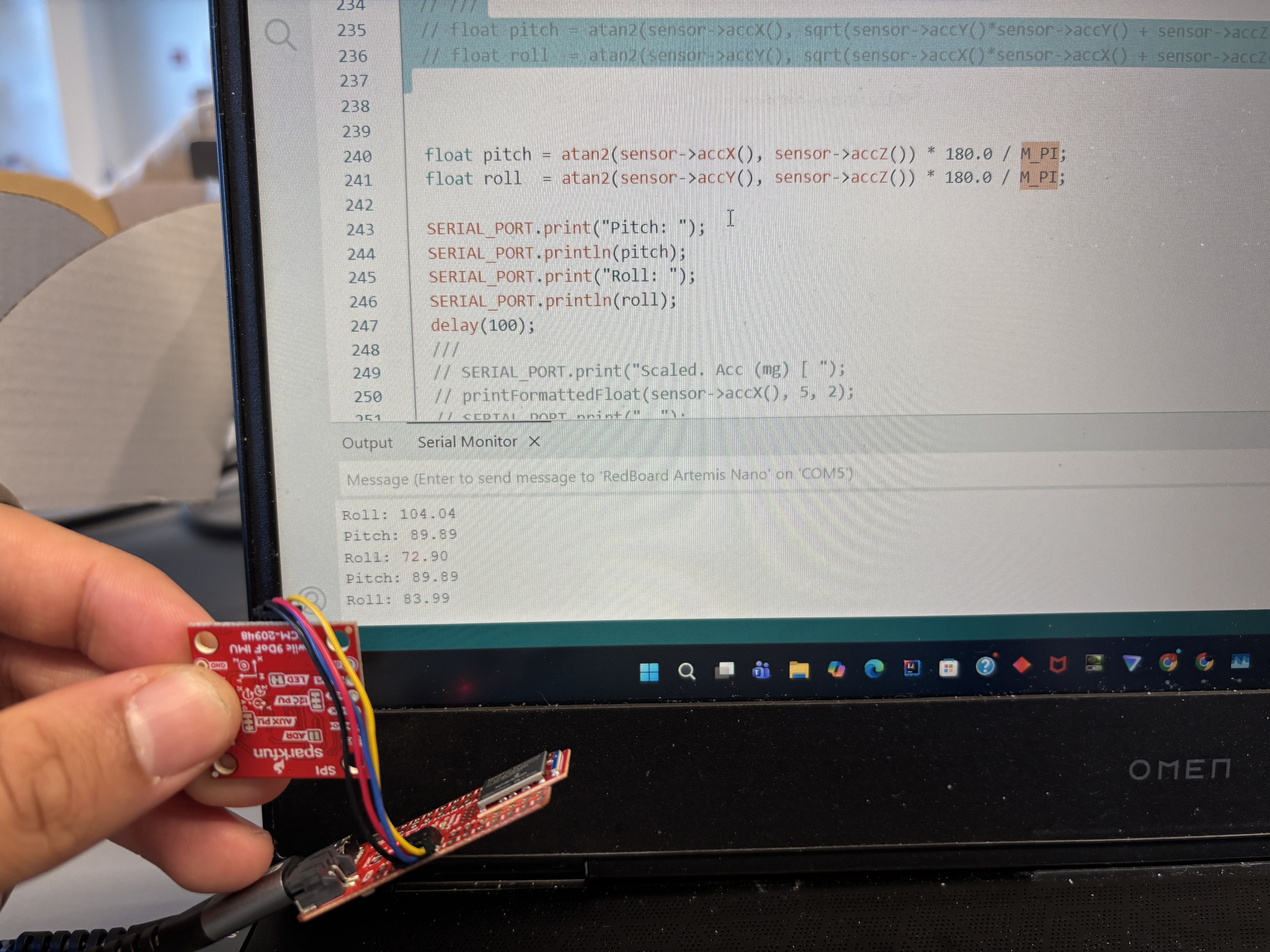
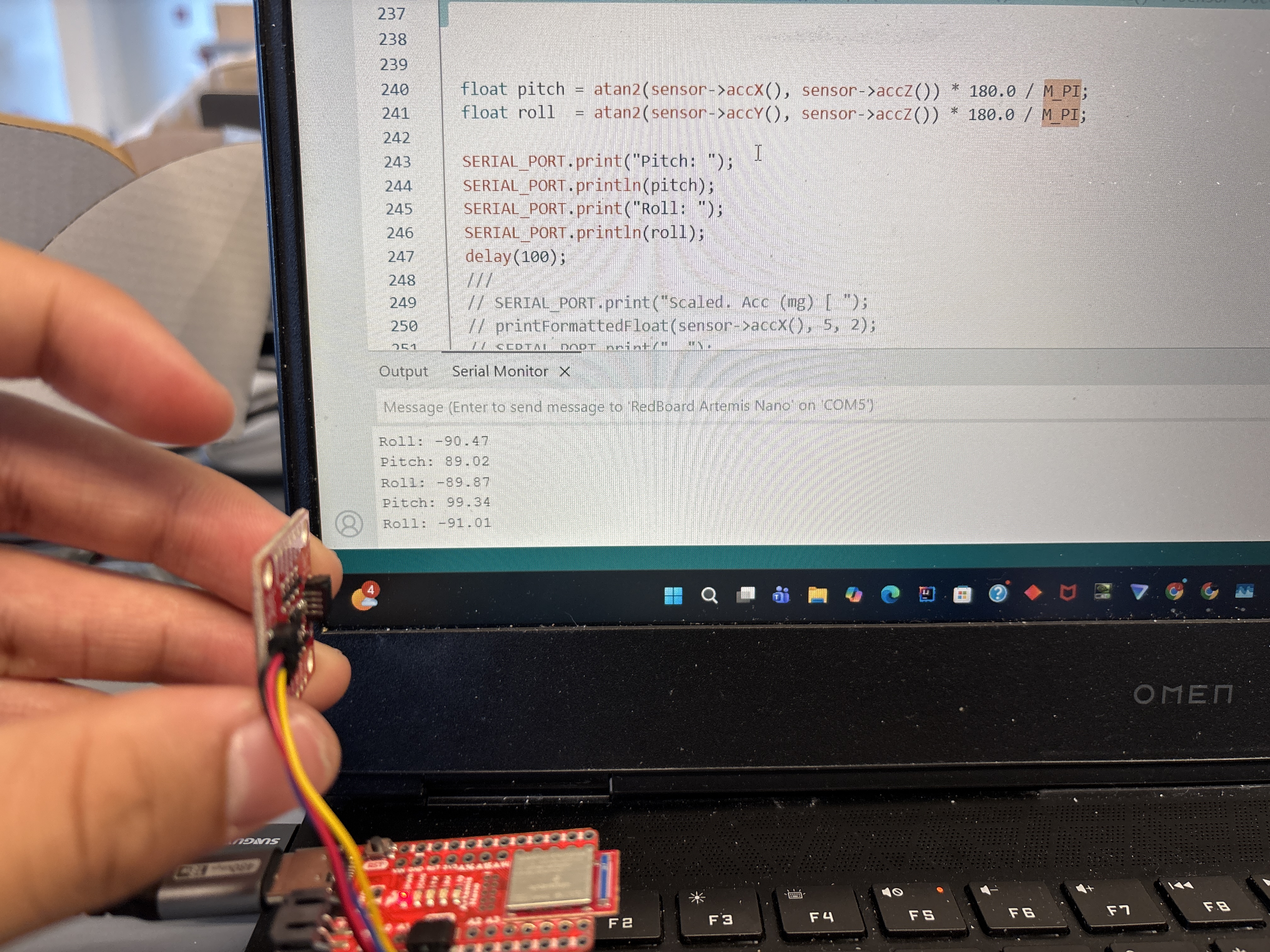
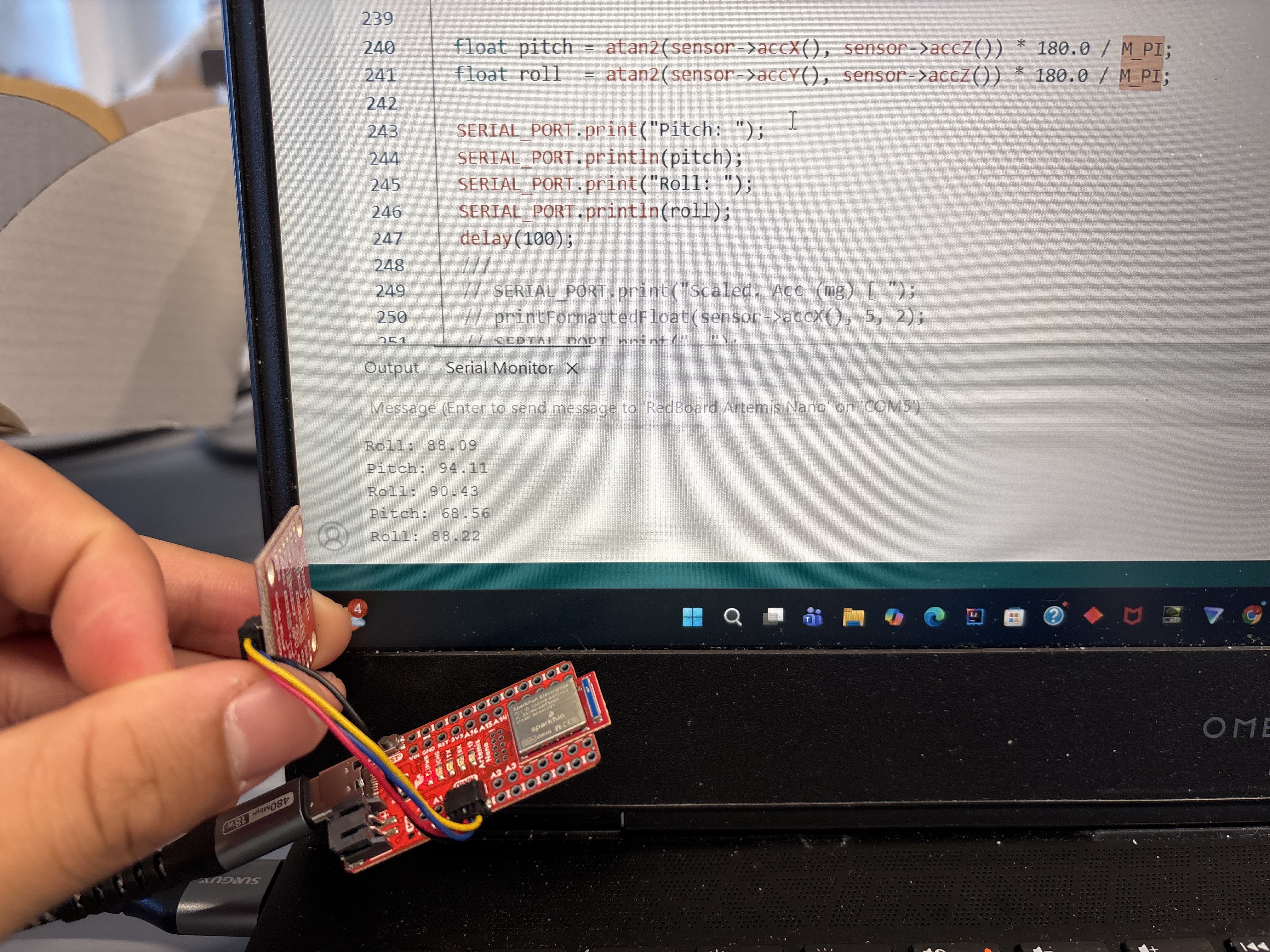
Here we can see that only one of the values is acurate at one time between the pitch and the roll.
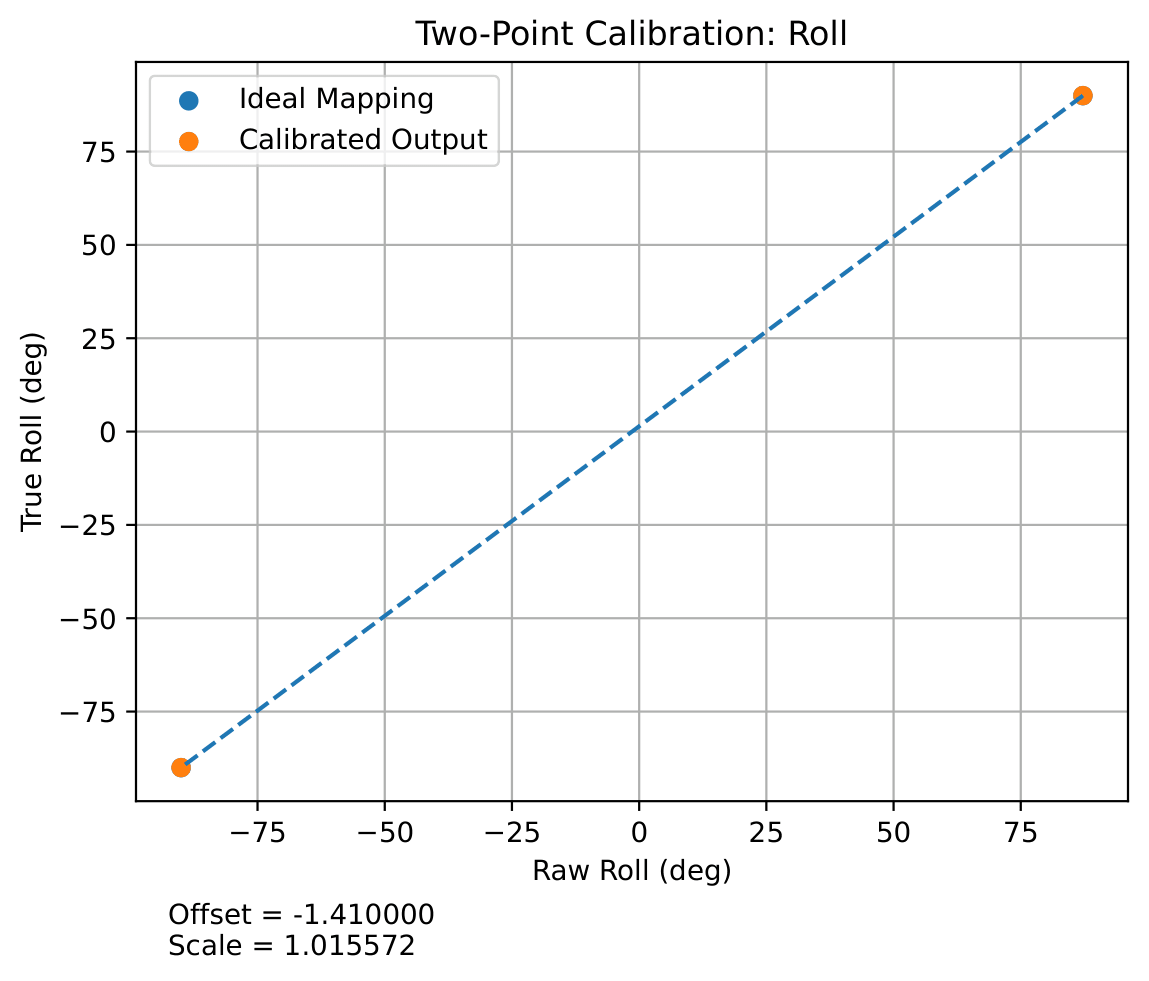
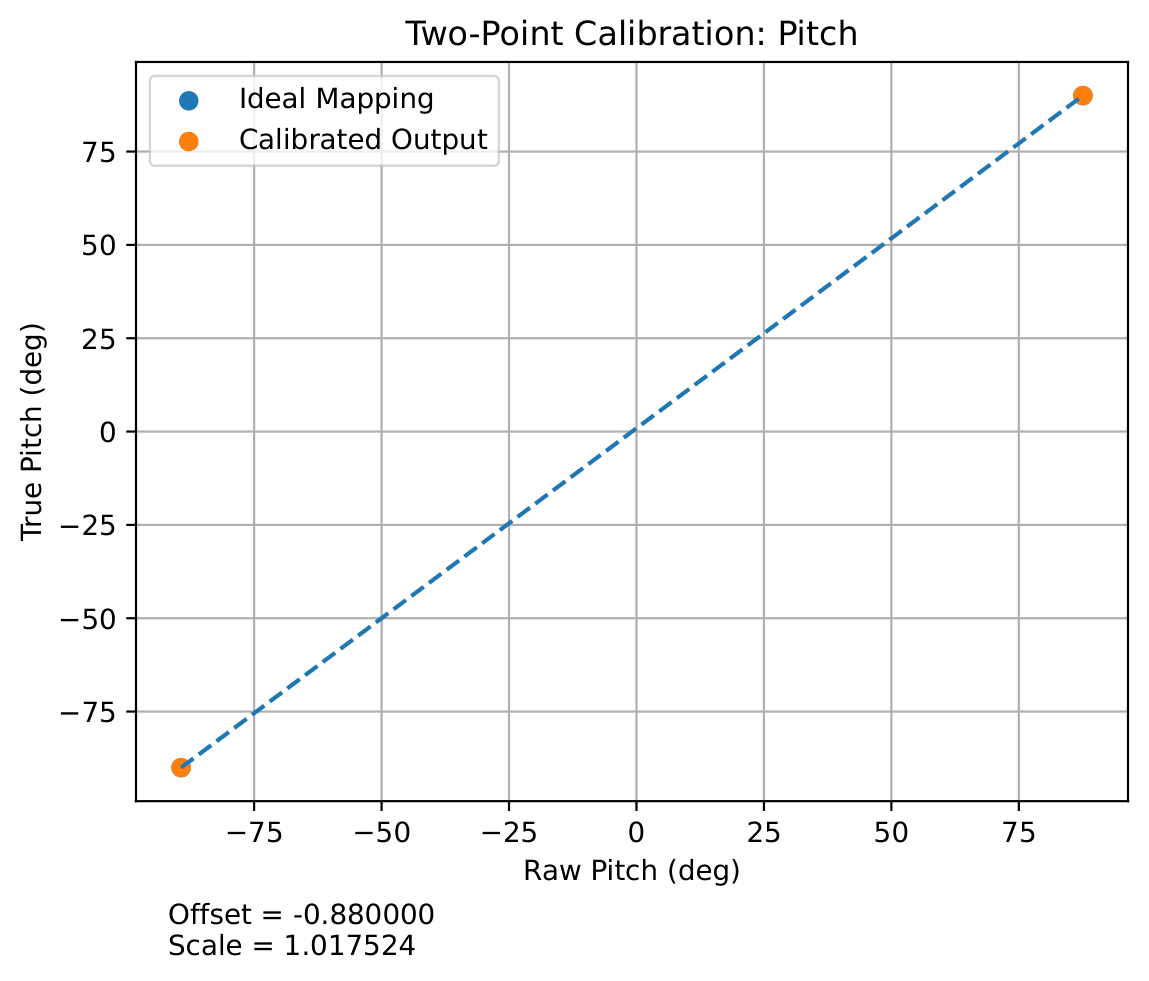
Accelerometer accuracy + two-point calibration
The equations I used for the calibration were: offset = (m1 + m2) / 2, scale = (t2 - t1) / (m2 - m1), where m1 and m2 are the measured values at two known orientations t1 and t2.
Noise analysis (FFT / frequency spectrum)
I first ploted the acc data on a frequency spectrum and recorded once with adding noise and once without. During recording I tapped and then vibrated the table to add nosie.
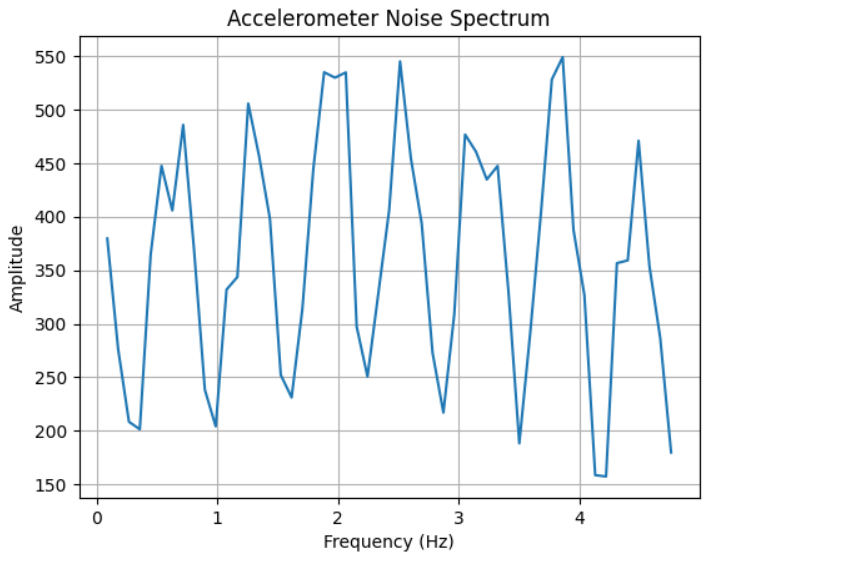
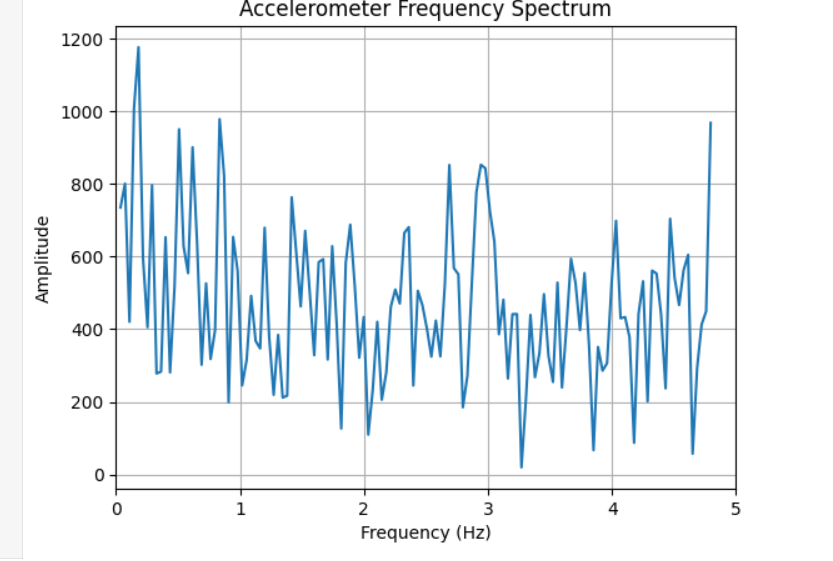
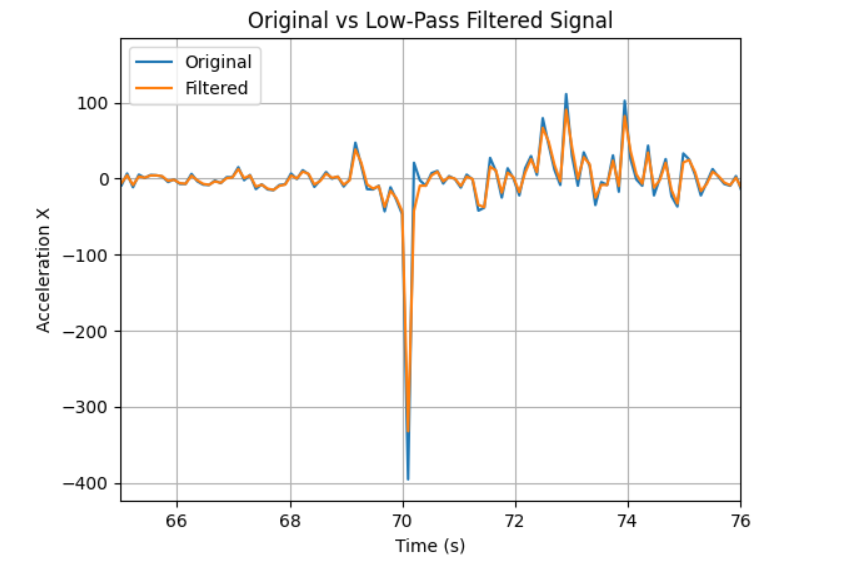
Cutoff frequency choice + low-pass filter
The data mainly fell in between 0 and 5 hz so I chose 7 hz as the cutoff frequency for my low-pass filter. Below you can see a comparison of the signal before and after using the low-pass filter.
fc = 7
alpha = (2*np.pi*fc) / (2*np.pi*fc + fs)
filtered = np.zeros_like(ax)
filtered[0] = ax[0]
for i in range(1, len(ax)):
filtered[i] = alpha*ax[i] + (1-alpha)*filtered[i-1]
plt.figure()
plt.plot(time, ax, label="Original")
plt.plot(time, filtered, label="Filtered")
plt.xlim(65, 76)
plt.xlabel("Time (s)")
plt.ylabel("Acceleration X")
plt.title("Original vs Low-Pass Filtered Signal")
plt.legend()
plt.grid(True)
plt.show()
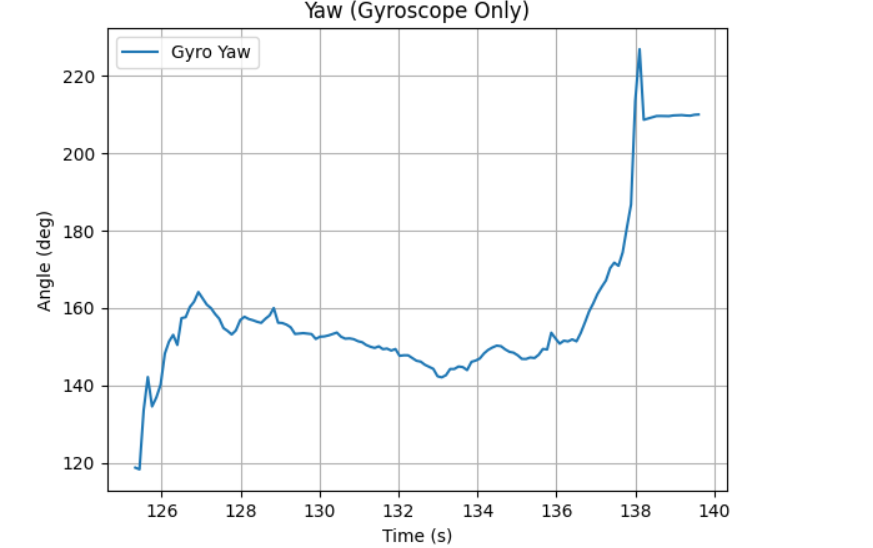
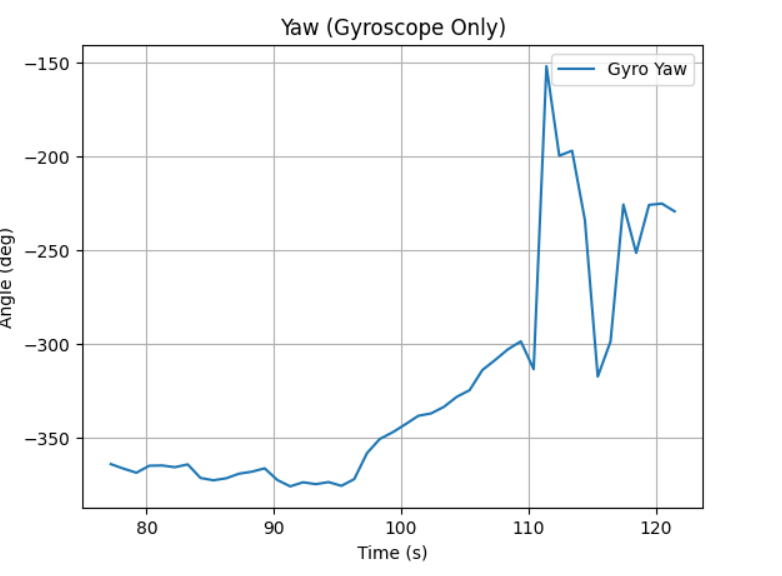
Gyroscope: pitch, roll, yaw from gyro integration
I then encorperated the gyro data and calculated pitch and roll as following:
float dt = (now_us - last_us) / 1000000.0f;
float gx = sensor->gyrX();
float gy = sensor->gyrY();
float gz = sensor->gyrZ();
roll_gyro += gx * dt;
pitch_gyro += gy * dt;
yaw_gyro += gz * dt;
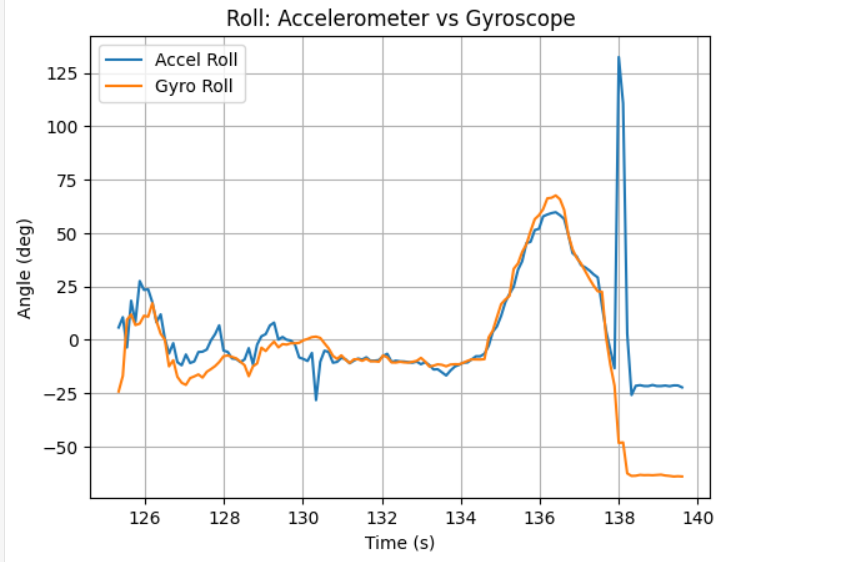
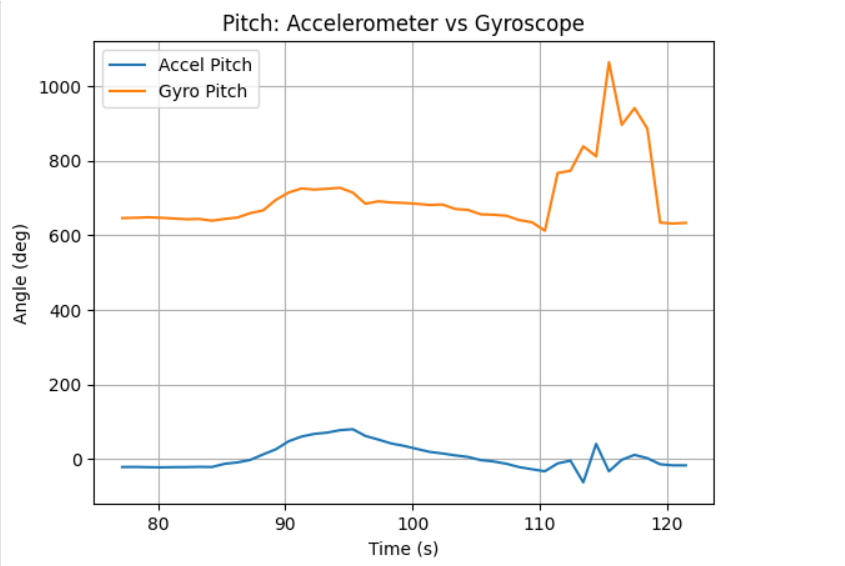
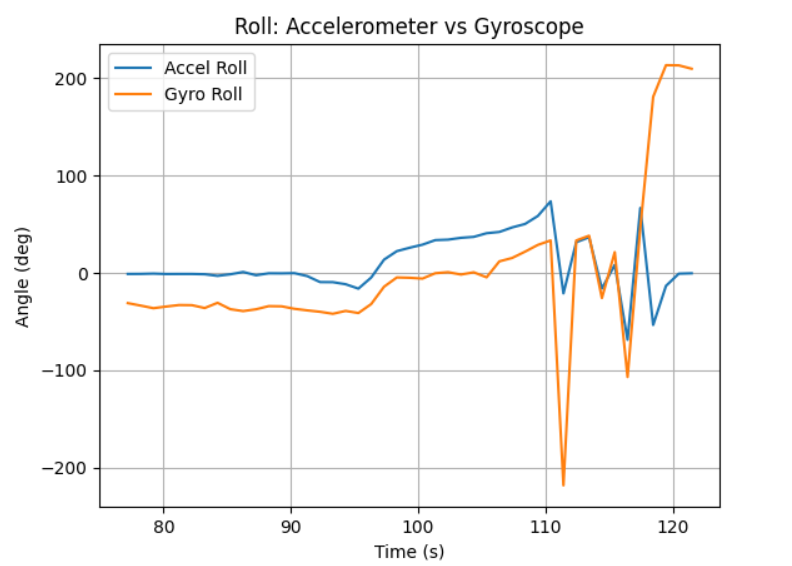
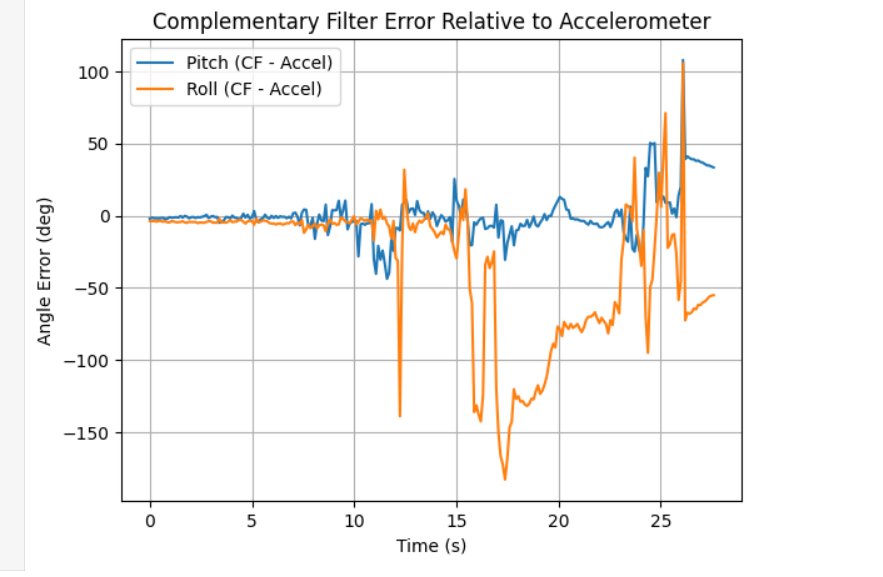
Compare gyro vs accelerometer vs filtered accel
I then plotted the difference in what the gyro and accelerometer measured for pitch and roll. The gyro data is more noisy and drifts over time while the accelerometer data is more stable.

Sampling frequency effects
Next I decreased the sampling frequency by a factor of 10. This seemed to cause the drift to be even more noticable for the same amount of time.
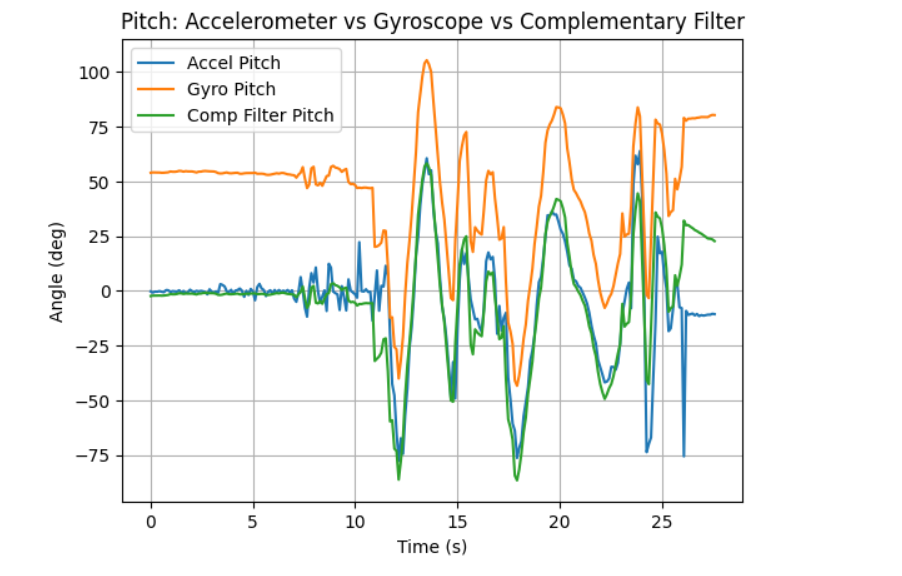
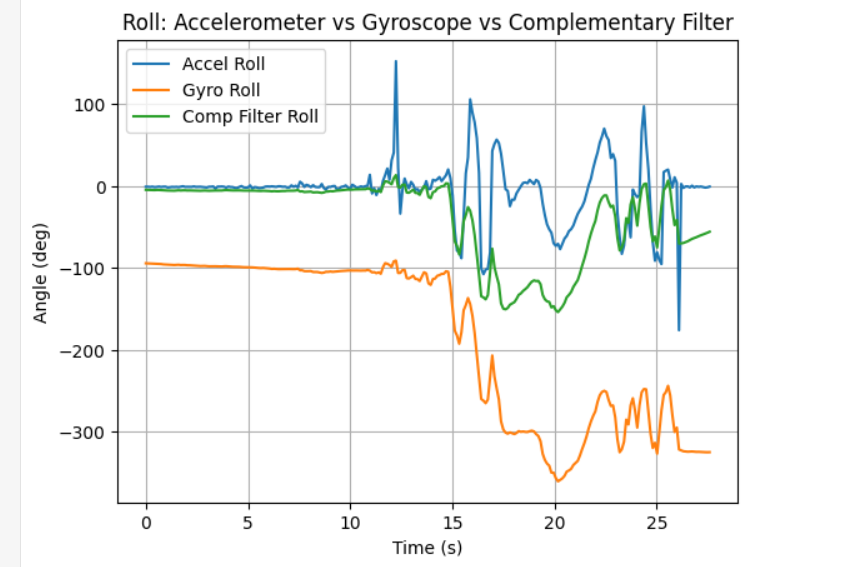
Complementary filter
Finally I implemented a complementary filter to combine the gyro and accelerometer data. The complementary filter uses a weighted average of the gyro and accelerometer angles, where the gyro provides short-term stability and the accelerometer provides long-term accuracy.
The formula is: roll_cf = alpha * (roll_cf + gx * dt) + (1-alpha) * roll_acc; pitch_cf = alpha * (pitch_cf + gy * dt) + (1-alpha) * pitch_acc; where alpha is a tuning parameter between 0 and 1 that determines the balance between gyro and accel.
This filter was able to significantly reduce the drift over time in our measured data, while some still remained.
roll_cf = alpha * (roll_cf + gx * dt) + (1-alpha) * roll_acc;
pitch_cf = alpha * (pitch_cf + gy * dt) + (1-alpha) * pitch_acc;
static unsigned long last_us = 0;
unsigned long now_us = micros();
if (last_us == 0) last_us = now_us;
float dt = (now_us - last_us) / 1000000.0f;
last_us = now_us;
float ax = sensor->accX();
float ay = sensor->accY();
float az = sensor->accZ();
float gx = sensor->gyrX();
float gy = sensor->gyrY();
float gz = sensor->gyrZ();
float roll_acc = atan2(ay, az) * 180.0f / M_PI;
float pitch_acc = atan2(-ax, sqrt(ay*ay + az*az)) * 180.0f / M_PI;
roll_gyro += gx * dt;
pitch_gyro += gy * dt;
yaw_gyro += gz * dt;
if (!cf_initialized) {
roll_cf = roll_acc;
pitch_cf = pitch_acc;
cf_initialized = true;
}
// complementary filter
roll_cf = ALPHA * (roll_cf + gx * dt) + (1.0f - ALPHA) * roll_acc;
pitch_cf = ALPHA * (pitch_cf + gy * dt) + (1.0f - ALPHA) * pitch_acc;
Sampling speed measurements
I then tested the speed at which the artemis can record values. I removed all serial print statements and stored data in arrays. In the main loop I added a loopCount variable to count the amount of times the loop runs. I then in the if statement checked if the loopCount was below N and also if the IMU data was ready. In the loop I update all of the arrays at their next respective index and increment the index. This allows me set a large value for N and then after N interations I can print out how high of an index the arrays reach and how high loopCount reached. The different between N and the variable to track the index (I used "count") tells us how many times the loop ran but wasn't able to enter the if statement due to the IMU data not being ready.
void loop()
{
loopCount++;
if (loopCount < N && myICM.dataReady())
{
myICM.getAGMT(); // The values are only updated when you call 'getAGMT'
// printRawAGMT( myICM.agmt ); // Uncomment this to see the raw values, taken directly from the agmt structure
printScaledAGMT(&myICM); // This function takes into account the scale settings from when the measurement was made to calculate the values with units
//delay(30);
t_us[count] = micros();
ax[count] = myICM.accX();
ay[count] = myICM.accY();
az[count] = myICM.accZ();
gx[count] = myICM.gyrX();
gy[count] = myICM.gyrY();
gz[count] = myICM.gyrZ();
count++;
sampleCount++;
}
}
With N set to 10,000 the count variable was able to reach 9,997 showing that it only dropped 2 packages. I also kept track of the time in microseconds and stored it in an array. At the first index 0 the time was 10,074,255 and at the last index 9,997 it was 28,892,176. This means 18,817,921 microseconds, or 18.817921 seconds passed during the time we were able to record 9,997 IMU samples. This is a sampling rate of about 531.5 samples per second.
Next I set up the ability to record and send over IMU values over Bluetooth. I used the commands from lab 1 and used GET_TIME_MILLIS to start recording data as well as SEND_TIME_DATA to stop recording data and send it over to my computer. I made more sense to store all the different data in different arrays to make it easier to sort out later when it reached the computer. I sent over the data as floats to preserve the precision that is recorded by the IMU. Finally I recorded my board capturing values for a few seconds.
bool keep_recording = false;
bool keep_sending = false;
float time_arr_imu[N];
float pitch_acc_a[N], roll_acc_a[N];
float pitch_gyro_a[N], roll_gyro_a[N], yaw_gyro_a[N];
if (keep_recording) {
static unsigned long last_us = 0;
unsigned long now_us = micros();
if (last_us == 0) last_us = now_us;
float dt = (now_us - last_us) / 1000000.0f;
last_us = now_us;
float ax = sensor->accX();
float ay = sensor->accY();
float az = sensor->accZ();
float gx = sensor->gyrX();
float gy = sensor->gyrY();
float gz = sensor->gyrZ();
float roll_acc = atan2(ay, az) * 180.0f / M_PI;
float pitch_acc = atan2(-ax, sqrt(ay*ay + az*az)) * 180.0f / M_PI;
roll_gyro += gx * dt;
pitch_gyro += gy * dt;
yaw_gyro += gz * dt;
if (!cf_initialized) {
roll_cf = roll_acc;
pitch_cf = pitch_acc;
cf_initialized = true;
}
roll_cf = ALPHA * (roll_cf + gx * dt) + (1.0f - ALPHA) * roll_acc;
pitch_cf = ALPHA * (pitch_cf + gy * dt) + (1.0f - ALPHA) * pitch_acc;
Serial.print(now_us);
Serial.print(",");
Serial.print(pitch_acc);
Serial.print(",");
Serial.print(roll_acc);
Serial.print(",");
Serial.print(pitch_gyro);
Serial.print(",");
Serial.print(roll_gyro);
Serial.print(",");
Serial.print(pitch_cf);
Serial.print(",");
Serial.println(roll_cf);
time_arr_imu[rec_count] = now_us;
pitch_acc_a[rec_count] = pitch_acc;
roll_acc_a[rec_count] = roll_acc;
pitch_gyro_a[rec_count] = pitch_gyro;
roll_gyro_a[rec_count] = roll_gyro;
yaw_gyro_a[rec_count] = yaw_gyro;
rec_count += 1;
if (rec_count >= N) {
keep_recording = false;
keep_sending = true;
}
}
if (keep_sending) {
if (old_rec_count >= rec_count) {
SERIAL_PORT.print(old_rec_count);
SERIAL_PORT.print(rec_count);
}
for (int j = old_rec_count; j < rec_count; j++) {
SERIAL_PORT.print(j);
tx_estring_value.clear();
// Format: j,time,pitchAcc,rollAcc,pitchGyro,rollGyro,yawGyro\n
tx_estring_value.append(j);
tx_estring_value.append(",");
tx_estring_value.append(time_arr_imu[j]);
tx_estring_value.append(",");
tx_estring_value.append(pitch_acc_a[j]);
tx_estring_value.append(",");
tx_estring_value.append(roll_acc_a[j]);
tx_estring_value.append(",");
tx_estring_value.append(pitch_gyro_a[j]);
tx_estring_value.append(",");
tx_estring_value.append(roll_gyro_a[j]);
tx_estring_value.append(",");
tx_estring_value.append(yaw_gyro_a[j]);
tx_characteristic_string.writeValue(tx_estring_value.c_str());
delay(100); // can likely be much smaller than 100
send_count += 1;
}
if (send_count >= rec_count) {
keep_sending = false;
}
old_rec_count = rec_count + 1;
}
My loop would constantly call the function above while the commands from my computer would toggle the keep_sending and keep_recording variables on an off controlling when I would record or send data.
Memory discussion
I was able to allocate 10,000 indecies to each of my arrays. When I tried to increase the oder of magnitude farther than this, I would get memory errors at compile time. As I calculated before, this corresponds to about 18 seconds of recording before I would need to clear my data. I then set up this python code to recieve the data.
time_arr_imu = []
pitch_acc_a = []
roll_acc_a = []
pitch_gyro_a = []
roll_gyro_a = []
yaw_gyro_a = []
def collect_array_nums(sender, byte_array):
line = ble.bytearray_to_string(byte_array).strip()
parts = line.split(",")
if len(parts) != 7:
return
j, t, pa, ra, pg, rg, yg = parts
time_arr_imu.append(t)
pitch_acc_a.append(pa)
roll_acc_a.append(ra)
pitch_gyro_a.append(pg)
roll_gyro_a.append(rg)
yaw_gyro_a.append(yg)
ble.start_notify(
ble.uuid['RX_STRING'],
collect_array_nums)
print(len(time_arr_imu))
print(len(pitch_acc_a))
print(len(roll_acc_a))
print(len(pitch_gyro_a))
print(len(roll_gyro_a))
print(len(yaw_gyro_a))
print(time_arr_imu)
print(pitch_acc_a)
print(roll_acc_a)
print(pitch_gyro_a)
print(roll_gyro_a)
print(yaw_gyro_a)
This was my recorded data for a few seconds.
301
301
301
301
301
301
['116994432.000', '117004576.000', '117013728.000', '117021960.000', '117032264.000', '117039368.000', '117046456.000', '117056640.000', '117062792.000', '117071928.000', '117083280.000', '117093592.000', '117104752.000', '117112928.000', '117123144.000', '117132288.000', '117138440.000', '117147640.000', '117155792.000', '117164048.000', '117174360.000', '117181472.000', '117188648.000', '117195816.000', '117203008.000', '117210240.000', '117217416.000', '117224584.000', '117231768.000', '117242000.000', '117251248.000', '117259472.000', '117267648.000', '117279048.000', '117286352.000', '117293664.000', '117300832.000', '117311752.000', '117321040.000', '117329264.000', '117337536.000', '117347832.000', '117357072.000', '117363312.000', '117372592.000', '117380832.000', '117391136.000', '117398336.000', '117405496.000', '117412704.000', '117419936.000', '117430176.000', '117439424.000', '117447648.000', '117455904.000', '117467360.000', '117474664.000', '117481840.000', '117488832.000', '117495840.000', '117502832.000', '117509832.000', '117520752.000', '117526984.000', '117536208.000', '117542448.000', '117551728.000', '117559960.000', '117570264.000', '117579504.000', '117590640.000', '117598872.000', '117609176.000', '117618416.000', '117624648.000', '117637856.000', '117647904.000', '117654840.000', '117661840.000', '117668840.000', '117675840.000', '117682832.000', '117689840.000', '117696832.000', '117703832.000', '117710832.000', '117717832.000', '117724832.000', '117734904.000', '117743880.000', '117751856.000', '117761896.000', '117768832.000', '117775840.000', '117782832.000', '117792904.000', '117801880.000', '117809856.000', '117817856.000', '117827904.000', '117836880.000', '117843128.000', '117852472.000', '117860760.000', '117869008.000', '117879312.000', '117886512.000', '117893688.000', '117900848.000', '117908032.000', '117915200.000', '117922368.000', '117929552.000', '117936720.000', '117943896.000', '117954984.000', '117964248.000', '117972472.000', '117980648.000', '117992048.000', '117999360.000', '118006664.000', '118013832.000', '118020832.000', '118027832.000', '118034832.000', '118045752.000', '118055040.000', '118063264.000', '118071536.000', '118081832.000', '118091072.000', '118097312.000', '118108464.000', '118116704.000', '118127000.000', '118136248.000', '118142480.000', '118151760.000', '118162072.000', '118170376.000', '118180728.000', '118189880.000', '118196128.000', '118207344.000', '118217656.000', '118226896.000', '118233136.000', '118242424.000', '118250656.000', '118260960.000', '118268160.000', '118275336.000', '118282496.000', '118289704.000', '118296936.000', '118311168.000', '118319488.000', '118329880.000', '118338880.000', '118345128.000', '118354472.000', '118362760.000', '118371008.000', '118381312.000', '118390552.000', '118396800.000', '118406072.000', '118414312.000', '118424616.000', '118431808.000', '118439000.000', '118446240.000', '118453416.000', '118460584.000', '118467768.000', '118478000.000', '118487248.000', '118495472.000', '118503648.000', '118515048.000', '118522352.000', '118529664.000', '118536832.000', '118543840.000', '118550832.000', '118557832.000', '118564832.000', '118571832.000', '118578832.000', '118585832.000', '118595904.000', '118604880.000', '118612856.000', '118620856.000', '118630896.000', '118637840.000', '118644840.000', '118651840.000', '118658840.000', '118665840.000', '118672832.000', '118679832.000', '118686832.000', '118693832.000', '118700832.000', '118710904.000', '118719880.000', '118727856.000', '118735856.000', '118745904.000', '118752840.000', '118759840.000', '118766840.000', '118773840.000', '118780832.000', '118787832.000', '118794832.000', '118805752.000', '118815040.000', '118823264.000', '118831536.000', '118841832.000', '118851072.000', '118857304.000', '118866592.000', '118874832.000', '118883088.000', '118891352.000', '118901656.000', '118910896.000', '118917136.000', '118926416.000', '118934648.000', '118946040.000', '118953352.000', '118960664.000', '118967832.000', '118977904.000', '118986880.000', '118997752.000', '119008056.000', '119017288.000', '119025536.000', '119033792.000', '119042056.000', '119052360.000', '119061592.000', '119067824.000', '119078984.000', '119087216.000', '119097520.000', '119104712.000', '119111888.000', '119120256.000', '119127560.000', '119134832.000', '119141832.000', '119151904.000', '119160880.000', '119168856.000', '119176864.000', '119186904.000', '119195880.000', '119202128.000', '119211472.000', '119219760.000', '119228008.000', '119238312.000', '119245512.000', '119252688.000', '119259856.000', '119267032.000', '119274200.000', '119281376.000', '119288552.000', '119295720.000', '119302896.000', '119310064.000', '119317240.000', '119328344.000', '119337584.000', '119345824.000', '119358320.000', '119365648.000', '119372832.000', '119379840.000', '119386840.000', '119393840.000', '119400832.000', '119407840.000', '119414832.000', '119421832.000', '119428832.000', '119435832.000', '119442832.000', '119449832.000', '119459904.000', '119468880.000', '119476856.000', '119484856.000']
['-35.189', '-34.942', '-35.279', '-34.755', '-34.631', '-35.164', '-35.115', '-34.734', '-34.886', '-35.274', '-35.397', '-34.677', '-35.391', '-36.062', '-35.972', '-35.466', '-34.986', '-35.180', '-35.433', '-35.705', '-35.346', '-35.268', '-35.470', '-34.830', '-35.526', '-34.279', '-35.461', '-35.336', '-35.161', '-34.612', '-35.370', '-35.184', '-35.082', '-35.054', '-35.317', '-36.240', '-35.770', '-34.496', '-35.026', '-35.215', '-35.747', '-35.741', '-35.521', '-35.369', '-35.722', '-34.652', '-35.565', '-35.422', '-35.370', '-35.528', '-35.273', '-35.532', '-35.332', '-35.610', '-35.084', '-34.821', '-34.785', '-36.159', '-35.973', '-35.333', '-35.287', '-35.043', '-35.191', '-35.242', '-34.680', '-35.480', '-34.949', '-35.701', '-35.218', '-35.492', '-34.771', '-35.440', '-35.070', '-35.746', '-35.447', '-35.358', '-35.908', '-35.647', '-35.019', '-35.262', '-35.725', '-35.932', '-35.299', '-35.436', '-35.550', '-35.573', '-35.067', '-35.501', '-35.053', '-34.684', '-34.503', '-35.338', '-35.430', '-34.687', '-35.426', '-34.917', '-35.319', '-35.393', '-35.184', '-35.552', '-35.812', '-35.142', '-35.932', '-35.679', '-35.653', '-35.598', '-35.279', '-35.741', '-35.066', '-34.735', '-34.896', '-35.105', '-35.393', '-34.978', '-35.224', '-35.195', '-35.517', '-35.051', '-35.324', '-35.481', '-34.654', '-35.530', '-34.762', '-35.097', '-35.992', '-35.252', '-34.962', '-34.830', '-34.929', '-35.740', '-34.925', '-35.605', '-35.755', '-34.871', '-35.854', '-34.790', '-35.804', '-35.708', '-35.431', '-34.524', '-35.178', '-35.825', '-34.958', '-35.766', '-34.873', '-35.210', '-35.335', '-35.384', '-35.198', '-35.851', '-35.309', '-35.254', '-35.740', '-35.868', '-36.599', '-35.262', '-34.844', '-35.518', '-35.018', '-35.654', '-35.597', '-35.180', '-36.385', '-36.070', '-35.358', '-35.557', '-34.443', '-34.610', '-34.789', '-34.900', '-35.638', '-35.816', '-34.671', '-34.755', '-35.410', '-34.896', '-34.825', '-34.932', '-35.719', '-35.391', '-35.658', '-36.812', '-34.146', '-35.542', '-36.039', '-35.411', '-35.902', '-34.934', '-35.631', '-35.538', '-35.175', '-35.521', '-35.087', '-35.412', '-35.199', '-34.890', '-35.794', '-35.679', '-35.528', '-35.811', '-35.643', '-34.977', '-35.443', '-35.177', '-35.729', '-35.405', '-35.279', '-35.969', '-35.774', '-35.151', '-35.164', '-35.133', '-34.921', '-34.908', '-34.985', '-35.594', '-35.343', '-35.218', '-35.241', '-34.776', '-35.496', '-35.598', '-35.154', '-35.789', '-36.096', '-35.268', '-35.621', '-34.710', '-35.042', '-35.197', '-33.883', '-34.756', '-34.554', '-34.840', '-35.868', '-35.956', '-35.568', '-35.210', '-35.350', '-35.704', '-34.862', '-34.777', '-35.500', '-35.066', '-35.859', '-35.734', '-34.900', '-35.222', '-35.972', '-35.522', '-35.187', '-35.466', '-34.698', '-35.399', '-35.940', '-35.613', '-35.656', '-35.271', '-35.324', '-35.731', '-35.719', '-36.018', '-35.285', '-35.107', '-35.980', '-35.012', '-35.093', '-34.908', '-35.527', '-36.027', '-36.307', '-35.468', '-35.178', '-35.345', '-35.421', '-35.482', '-34.828', '-35.473', '-35.819', '-35.176', '-35.262', '-35.270', '-35.834', '-35.161', '-36.140', '-35.256', '-35.179', '-35.463', '-35.162', '-35.307', '-35.141', '-35.892', '-35.494', '-35.183', '-35.219', '-35.077', '-35.884', '-35.363', '-35.745', '-35.323', '-35.242']
['162.467', '162.627', '162.364', '163.132', '162.373', '163.432', '162.582', '164.021', '163.227', '163.475', '162.633', '162.585', '162.559', '163.094', '163.283', '163.811', '163.582', '162.892', '163.391', '162.435', '162.172', '163.380', '162.838', '162.982', '163.514', '162.843', '163.577', '163.495', '163.634', '162.406', '162.758', '162.841', '163.284', '162.821', '162.637', '162.500', '163.038', '162.742', '163.530', '163.194', '163.084', '162.420', '163.264', '163.006', '162.533', '162.458', '162.787', '163.119', '163.466', '162.884', '163.237', '163.196', '162.460', '163.095', '163.290', '162.687', '162.410', '163.503', '164.466', '163.103', '163.270', '162.062', '162.897', '162.993', '163.458', '163.150', '162.747', '163.735', '164.179', '162.063', '162.689', '163.073', '161.871', '162.413', '164.285', '162.430', '163.453', '163.520', '163.353', '162.689', '163.091', '162.650', '162.724', '163.194', '162.218', '162.835', '163.036', '162.976', '163.144', '163.280', '163.149', '162.938', '163.348', '162.545', '162.904', '163.213', '164.234', '162.560', '162.387', '162.694', '163.297', '164.092', '162.848', '163.008', '162.325', '163.089', '162.894', '162.687', '162.300', '163.287', '163.770', '163.079', '162.639', '163.501', '163.211', '162.358', '162.618', '163.586', '163.153', '163.162', '162.721', '162.889', '162.129', '163.069', '164.006', '163.743', '163.384', '163.659', '163.407', '163.071', '163.217', '163.254', '163.582', '163.102', '163.307', '162.791', '163.280', '164.208', '163.148', '162.088', '162.965', '162.748', '162.538', '163.496', '162.897', '164.149', '163.719', '164.348', '163.214', '163.089', '162.579', '163.153', '162.711', '162.810', '163.736', '163.233', '163.231', '162.271', '163.374', '163.563', '162.378', '162.352', '162.894', '162.897', '162.736', '162.380', '163.122', '162.069', '162.785', '163.101', '162.533', '163.453', '164.140', '162.668', '162.787', '162.400', '162.889', '162.866', '163.660', '163.189', '162.863', '161.747', '163.106', '163.549', '163.437', '163.477', '163.196', '163.479', '163.810', '161.985', '162.889', '163.357', '163.866', '162.933', '162.958', '162.838', '162.928', '163.294', '162.685', '162.727', '163.157', '163.160', '163.565', '163.290', '162.216', '162.635', '162.150', '162.643', '163.030', '162.902', '163.411', '163.463', '162.621', '163.050', '162.422', '164.045', '162.567', '163.671', '163.341', '163.571', '163.076', '163.544', '162.296', '162.800', '162.369', '163.626', '162.892', '163.575', '163.138', '162.884', '162.965', '162.980', '163.238', '162.746', '163.612', '163.596', '163.033', '163.545', '162.832', '163.145', '163.705', '163.872', '162.819', '163.066', '163.187', '163.317', '162.417', '162.162', '162.098', '162.643', '162.704', '162.783', '162.498', '163.237', '162.892', '163.606', '163.509', '163.014', '162.907', '162.803', '162.967', '161.855', '163.759', '162.298', '163.095', '162.902', '162.411', '163.020', '162.950', '163.351', '162.515', '163.304', '163.992', '162.702', '162.664', '162.614', '163.651', '164.293', '163.023', '161.728', '162.917', '163.094', '163.260', '162.993', '162.825', '162.994', '163.228', '163.350', '163.320', '163.256', '163.081', '163.334', '163.411', '162.707', '162.248', '162.838', '163.149', '162.464', '162.838', '162.298', '163.254']
['0.000', '-0.026', '-0.038', '-0.061', '-0.101', '-0.100', '-0.110', '-0.104', '-0.114', '-0.125', '-0.133', '-0.147', '-0.130', '-0.138', '-0.143', '-0.132', '-0.151', '-0.156', '-0.154', '-0.143', '-0.173', '-0.166', '-0.169', '-0.169', '-0.159', '-0.166', '-0.159', '-0.153', '-0.136', '-0.119', '-0.113', '-0.108', '-0.103', '-0.109', '-0.117', '-0.139', '-0.169', '-0.211', '-0.259', '-0.262', '-0.264', '-0.267', '-0.281', '-0.285', '-0.300', '-0.322', '-0.330', '-0.353', '-0.357', '-0.376', '-0.372', '-0.389', '-0.411', '-0.403', '-0.413', '-0.422', '-0.414', '-0.413', '-0.439', '-0.428', '-0.417', '-0.431', '-0.440', '-0.437', '-0.415', '-0.414', '-0.409', '-0.395', '-0.392', '-0.380', '-0.425', '-0.442', '-0.466', '-0.469', '-0.482', '-0.506', '-0.525', '-0.534', '-0.542', '-0.551', '-0.560', '-0.558', '-0.560', '-0.568', '-0.550', '-0.553', '-0.551', '-0.563', '-0.568', '-0.607', '-0.596', '-0.574', '-0.588', '-0.579', '-0.573', '-0.566', '-0.587', '-0.594', '-0.580', '-0.562', '-0.588', '-0.582', '-0.573', '-0.575', '-0.570', '-0.542', '-0.550', '-0.549', '-0.551', '-0.550', '-0.552', '-0.554', '-0.552', '-0.573', '-0.583', '-0.576', '-0.585', '-0.610', '-0.639', '-0.609', '-0.611', '-0.590', '-0.604', '-0.626', '-0.629', '-0.631', '-0.630', '-0.629', '-0.637', '-0.652', '-0.636', '-0.614', '-0.605', '-0.608', '-0.606', '-0.610', '-0.615', '-0.607', '-0.598', '-0.622', '-0.632', '-0.622', '-0.654', '-0.655', '-0.641', '-0.646', '-0.644', '-0.638', '-0.621', '-0.622', '-0.653', '-0.647', '-0.646', '-0.662', '-0.683', '-0.670', '-0.685', '-0.695', '-0.688', '-0.680', '-0.707', '-0.714', '-0.729', '-0.724', '-0.754', '-0.749', '-0.757', '-0.738', '-0.738', '-0.726', '-0.734', '-0.719', '-0.722', '-0.716', '-0.710', '-0.695', '-0.679', '-0.657', '-0.665', '-0.654', '-0.691', '-0.727', '-0.752', '-0.774', '-0.775', '-0.780', '-0.783', '-0.797', '-0.785', '-0.798', '-0.797', '-0.801', '-0.814', '-0.819', '-0.809', '-0.803', '-0.785', '-0.767', '-0.754', '-0.743', '-0.758', '-0.739', '-0.740', '-0.735', '-0.736', '-0.752', '-0.741', '-0.745', '-0.755', '-0.754', '-0.762', '-0.768', '-0.785', '-0.770', '-0.760', '-0.781', '-0.780', '-0.797', '-0.785', '-0.763', '-0.781', '-0.801', '-0.783', '-0.785', '-0.792', '-0.793', '-0.794', '-0.812', '-0.820', '-0.831', '-0.819', '-0.811', '-0.785', '-0.787', '-0.800', '-0.815', '-0.820', '-0.820', '-0.804', '-0.806', '-0.797', '-0.832', '-0.835', '-0.833', '-0.833', '-0.844', '-0.824', '-0.814', '-0.806', '-0.805', '-0.809', '-0.767', '-0.777', '-0.771', '-0.772', '-0.775', '-0.752', '-0.780', '-0.763', '-0.778', '-0.775', '-0.740', '-0.738', '-0.750', '-0.753', '-0.753', '-0.745', '-0.756', '-0.768', '-0.754', '-0.756', '-0.767', '-0.772', '-0.789', '-0.774', '-0.747', '-0.763', '-0.756', '-0.771', '-0.782', '-0.779', '-0.788', '-0.792', '-0.802', '-0.787', '-0.782', '-0.785', '-0.791', '-0.785', '-0.808', '-0.827', '-0.839', '-0.827', '-0.834', '-0.843', '-0.849', '-0.870', '-0.878', '-0.881', '-0.867', '-0.840']
['0.000', '0.002', '-0.005', '-0.004', '0.021', '0.028', '0.042', '0.062', '0.066', '0.074', '0.078', '0.090', '0.079', '0.088', '0.059', '0.052', '0.047', '0.027', '-0.008', '-0.013', '0.003', '-0.020', '-0.021', '-0.017', '-0.032', '-0.035', '-0.036', '-0.024', '-0.027', '-0.037', '-0.066', '-0.086', '-0.118', '-0.138', '-0.137', '-0.138', '-0.135', '-0.127', '-0.109', '-0.129', '-0.127', '-0.113', '-0.105', '-0.105', '-0.096', '-0.091', '-0.090', '-0.096', '-0.080', '-0.091', '-0.103', '-0.075', '-0.091', '-0.100', '-0.067', '-0.050', '-0.069', '-0.061', '-0.068', '-0.092', '-0.100', '-0.093', '-0.129', '-0.134', '-0.150', '-0.166', '-0.177', '-0.172', '-0.154', '-0.177', '-0.165', '-0.174', '-0.178', '-0.202', '-0.213', '-0.218', '-0.220', '-0.234', '-0.237', '-0.252', '-0.240', '-0.263', '-0.249', '-0.244', '-0.243', '-0.222', '-0.233', '-0.233', '-0.243', '-0.243', '-0.264', '-0.279', '-0.266', '-0.279', '-0.267', '-0.291', '-0.273', '-0.282', '-0.296', '-0.297', '-0.280', '-0.291', '-0.299', '-0.302', '-0.311', '-0.325', '-0.322', '-0.333', '-0.330', '-0.346', '-0.349', '-0.334', '-0.347', '-0.350', '-0.352', '-0.358', '-0.365', '-0.349', '-0.345', '-0.388', '-0.397', '-0.416', '-0.417', '-0.415', '-0.427', '-0.416', '-0.410', '-0.407', '-0.397', '-0.386', '-0.423', '-0.444', '-0.452', '-0.427', '-0.419', '-0.432', '-0.446', '-0.451', '-0.471', '-0.500', '-0.478', '-0.493', '-0.475', '-0.488', '-0.509', '-0.507', '-0.520', '-0.525', '-0.530', '-0.566', '-0.549', '-0.571', '-0.569', '-0.592', '-0.584', '-0.597', '-0.602', '-0.593', '-0.611', '-0.630', '-0.629', '-0.640', '-0.668', '-0.664', '-0.667', '-0.663', '-0.654', '-0.645', '-0.642', '-0.665', '-0.650', '-0.661', '-0.663', '-0.690', '-0.696', '-0.719', '-0.726', '-0.739', '-0.772', '-0.767', '-0.752', '-0.772', '-0.743', '-0.748', '-0.743', '-0.746', '-0.751', '-0.745', '-0.743', '-0.734', '-0.725', '-0.732', '-0.734', '-0.758', '-0.785', '-0.834', '-0.830', '-0.828', '-0.817', '-0.834', '-0.818', '-0.821', '-0.820', '-0.833', '-0.834', '-0.826', '-0.852', '-0.845', '-0.848', '-0.854', '-0.858', '-0.862', '-0.850', '-0.867', '-0.884', '-0.876', '-0.882', '-0.867', '-0.870', '-0.857', '-0.859', '-0.864', '-0.897', '-0.925', '-0.937', '-0.937', '-0.942', '-0.932', '-0.916', '-0.925', '-0.948', '-0.957', '-0.971', '-1.006', '-1.016', '-1.026', '-1.033', '-1.022', '-1.027', '-1.015', '-1.004', '-0.995', '-1.009', '-1.017', '-1.030', '-1.027', '-1.041', '-1.067', '-1.083', '-1.046', '-1.031', '-1.075', '-1.070', '-1.086', '-1.100', '-1.119', '-1.125', '-1.121', '-1.151', '-1.138', '-1.164', '-1.191', '-1.200', '-1.200', '-1.225', '-1.211', '-1.208', '-1.236', '-1.227', '-1.234', '-1.213', '-1.223', '-1.228', '-1.216', '-1.209', '-1.216', '-1.221', '-1.227', '-1.216', '-1.210', '-1.201', '-1.217', '-1.224', '-1.212', '-1.220', '-1.238', '-1.232', '-1.212', '-1.227', '-1.221', '-1.248', '-1.244', '-1.251', '-1.274', '-1.270', '-1.285', '-1.277', '-1.294', '-1.272', '-1.287', '-1.308']
['0.000', '0.010', '0.016', '0.031', '0.045', '0.048', '0.052', '0.063', '0.050', '0.064', '0.080', '0.069', '0.073', '0.074', '0.067', '0.063', '0.066', '0.048', '0.018', '0.011', '0.030', '0.019', '0.027', '0.024', '0.018', '0.024', '0.019', '0.006', '0.003', '0.002', '-0.017', '-0.035', '-0.038', '-0.005', '0.004', '-0.005', '-0.008', '-0.013', '0.021', '0.008', '0.005', '0.006', '0.011', '-0.000', '0.007', '0.039', '0.031', '0.030', '0.019', '0.025', '0.007', '0.020', '0.027', '0.046', '0.035', '0.049', '0.053', '0.038', '0.045', '0.017', '0.020', '0.032', '0.014', '0.011', '0.006', '0.012', '0.016', '0.034', '0.081', '0.083', '0.091', '0.084', '0.093', '0.098', '0.104', '0.074', '0.073', '0.065', '0.086', '0.088', '0.088', '0.075', '0.059', '0.052', '0.065', '0.070', '0.092', '0.102', '0.109', '0.117', '0.111', '0.105', '0.142', '0.128', '0.133', '0.103', '0.124', '0.112', '0.101', '0.106', '0.115', '0.109', '0.123', '0.132', '0.109', '0.096', '0.099', '0.096', '0.088', '0.087', '0.086', '0.105', '0.112', '0.126', '0.127', '0.117', '0.113', '0.109', '0.110', '0.077', '0.087', '0.063', '0.077', '0.077', '0.066', '0.073', '0.072', '0.081', '0.103', '0.134', '0.114', '0.113', '0.121', '0.143', '0.150', '0.160', '0.158', '0.166', '0.174', '0.173', '0.188', '0.190', '0.211', '0.214', '0.185', '0.214', '0.214', '0.210', '0.219', '0.219', '0.256', '0.252', '0.252', '0.235', '0.251', '0.232', '0.253', '0.250', '0.215', '0.215', '0.213', '0.192', '0.194', '0.193', '0.193', '0.201', '0.209', '0.230', '0.239', '0.201', '0.209', '0.202', '0.211', '0.207', '0.209', '0.213', '0.202', '0.229', '0.226', '0.213', '0.220', '0.233', '0.235', '0.238', '0.216', '0.242', '0.233', '0.245', '0.238', '0.220', '0.227', '0.228', '0.252', '0.257', '0.237', '0.268', '0.269', '0.277', '0.274', '0.278', '0.296', '0.302', '0.325', '0.300', '0.311', '0.319', '0.290', '0.315', '0.343', '0.327', '0.337', '0.338', '0.359', '0.343', '0.344', '0.352', '0.354', '0.360', '0.380', '0.363', '0.365', '0.368', '0.388', '0.385', '0.381', '0.363', '0.342', '0.351', '0.372', '0.355', '0.357', '0.362', '0.340', '0.330', '0.354', '0.362', '0.351', '0.362', '0.342', '0.353', '0.319', '0.373', '0.365', '0.361', '0.379', '0.405', '0.409', '0.411', '0.413', '0.458', '0.467', '0.449', '0.475', '0.489', '0.478', '0.490', '0.477', '0.491', '0.462', '0.483', '0.457', '0.456', '0.467', '0.475', '0.479', '0.500', '0.520', '0.535', '0.546', '0.541', '0.551', '0.557', '0.555', '0.546', '0.514', '0.500', '0.503', '0.482', '0.497', '0.491', '0.505', '0.533', '0.534', '0.567', '0.574', '0.563', '0.571', '0.576', '0.580', '0.591', '0.572', '0.574', '0.578', '0.568', '0.578', '0.583', '0.560', '0.597', '0.610', '0.599', '0.608']
Finally I demonstrated a short stunt with my car in which I was able to drive fast in one directions then quickly spint the wheels the other direction allowing the car to flip over.